









香港科技大学(科大)工学院的跨学科研究团队最近成功开发了一套「拟人化认知编码系统」,让自动驾驶车(自驾车)能像人类司机般「思考」,综合判断复杂路况。这项崭新技术可将整体交通风险降低26.3%,而对于行人及骑行者等高风险群体来说,潜在意外更大幅减少51.7%。与此同时,自驾车的自身风险也下降了8.3%,为自动驾驶技术的安全性迈进一大步。
现行自动驾驶系统的一大局限,在于其「单对单」风险评估机制,即每次只能比较两个选项,无法像人类司机那样全面考虑道路上的多方互动,例如在十字路口优先让路予行人,再适度调整与附近车辆距离;一旦确定行人安全,再迅速将注意力转向其他车辆。这种动态决策能力,称为「社会敏感度 (social sensitivity)」。
为了让自驾车可「学习」人类的社会敏感度,科大土木及环境工程学系讲座教授杨海牵头的研究团队借鉴了神经科学、认知科学和伦理学概念,开发出符合人类认知逻辑的编码方案,为自动驾驶系统配备接近真人司机的感知、评估与行动能力。
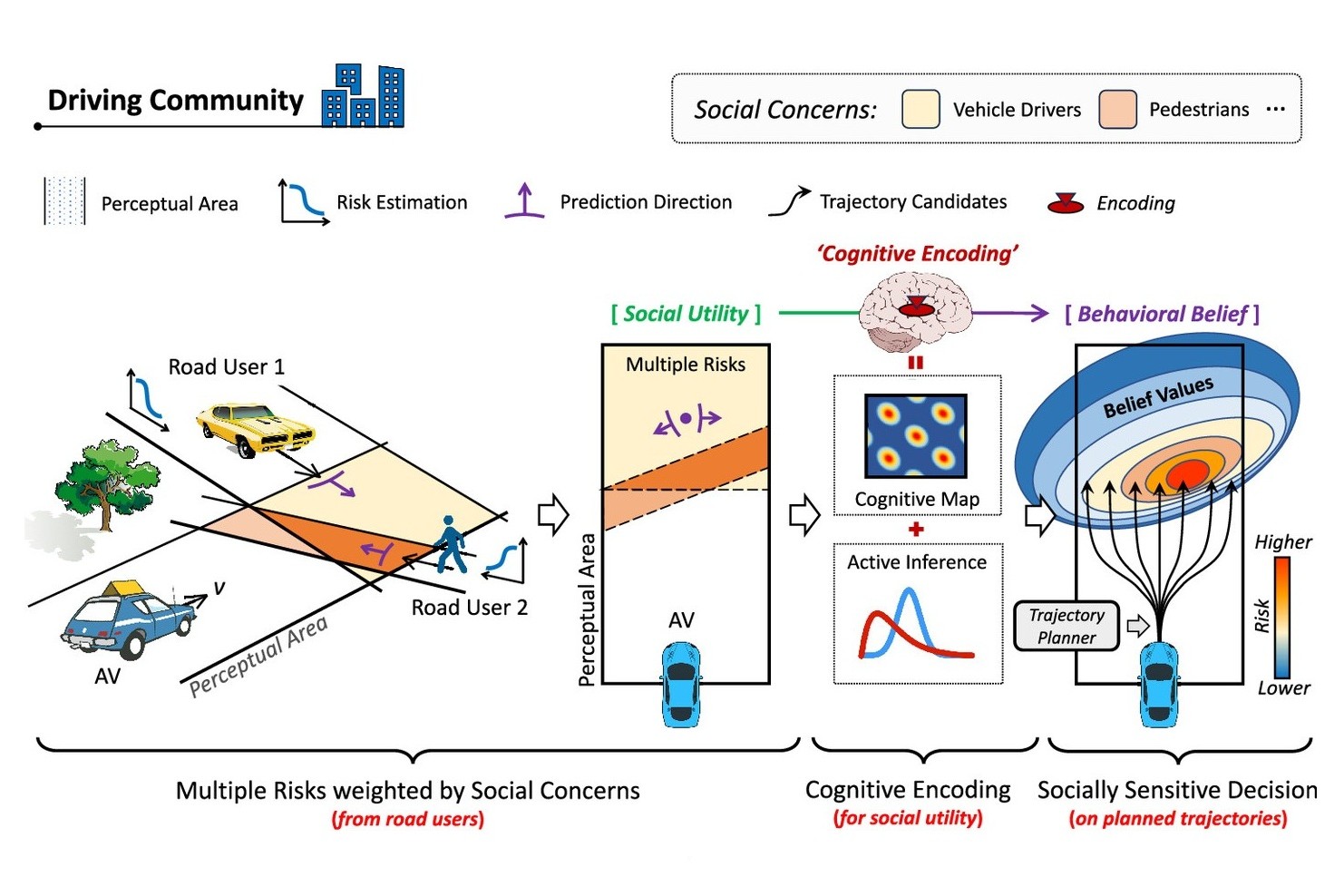
该系统结合了三项关键创新:
一、个体风险评估模组 (Individual Risk Assessment):评估每位道路使用者(包括行人、单车、电单车与邻近车辆)的潜在风险,包括分析其速度、相对距离和行为规律,例如,在路边行走的小孩会被归类为高风险群体。
二、社会权重风险映射模组 (Socially Weighted Risk Mapping):在决策过程中引入伦理权重,优先保护弱势群体,例如在实际应用上,自驾车即使在规则允许前进的情况下,亦可能会主动礼让行人。
三、行为信念编码模组 (Behavioral Belief Encoding):能预判自驾车决策对整体交通状况的影响,举例说突然变道会否导致周边司机急刹,或者加剧路面挤塞。
为了验证安全性能,研究团队采用了2,000种不同的模拟交通场景进行测试,结果显示,使用新系统后,整体交通风险降低了26.3%。值得留意的是,在安全性提升的同时,行车效率亦得到改善。搭配新系统的自驾车完成驾驶任务的时间平均缩短了13.9%,显示出道德驾驶与高效运作可以并行不悖。
杨教授说:「我们模拟了人类在整体风险评估与道德判断方面的能力,使自驾车在面对涉及重大道德责任的交通情景,例如学校周边或繁忙路口时,能作出更审慎且负责任的决策。」
杨教授补充:「我们的系统设计灵活,可因应不同国家或地区的法规与社会价值观作调整。例如,有些地域注重保护弱势道路使用者,亦有些则着重于提升交通流畅度;此外,各地对于交通事故责任的法律诠释也存在差异。透过调整系统设定,自驾车能够如地道司机般融入各地交通环境,极具潜力于全球广泛应用。」
本研究由科大清水湾与广州两个校区合作,并联同东南大学、北京理工大学、清华大学、同济大学及华盛顿大学共同完成。论文题为「Empowering Safer Socially Sensitive Autonomous Vehicles Using Human-Plausible Cognitive Encoding」,近期发表于《美国国家科学院院刊》(PNAS)。
至于下一步,团队正着手构建一个大规模的数据集,涵盖多个地域的驾驶行为特征与社会期望,并与潜在合作伙伴商讨,以推进该系统的集成与实地测试工作。
注册收取我们的最新消息
最新消息

香港科技大学(科大)赛马会高等研究院将于2026年2月6日 (星期五)举办诺贝尔专题讲座@高研院。是次论坛邀的三位诺贝尔物理学奖得主,以及科大荣休校长、超导体物理学家朱经武教授齐聚一堂,与科大师生、校友、研究人员及广大公众共同探讨物理学的前沿发展和未来方向。活动旨在连系全球顶尖学者,推动科大成为孕育知识和培育人才的重要基地。
作为科大创校35周年和赛马会高等研究院成立20周年志庆活动之一,是次学术盛会以「Horizons Unbound:Exploring the Ultimate Frontiers of Science」为主题,汇聚全球最具影响力的物理学家,通过启迪演讲和对谈,传释科学改变世界的力量。
四位主讲嘉宾(按英文姓氏顺序排列)包括:
朱经武教授
香港科技大学(科大)研究团队研发出一项突破性的污水处理技术。该技术结合了基于生物沉积形成的生物膜滤网与超音波空蚀清洗技术,能在厌氧条件下于3.8秒内完成滤网清洗,其处理污水量较现行传统生物膜反应器(MBR)高出10至20倍。新技术不仅在极低能源消耗下维持高效运作,经处理后的水质亦高于国际及本地标准,每立方米汙水的处理成本亦更低至传统MBR的50%。这项创新技术为处理生活和工业汙水带来可持续性的崭新方案。
研究团队由科大土木及环境工程学系讲座教授陈光浩教授领导,团队成员包括土木及环境工程学系博士后研究员郭洪骁博士及博士生罗宇等人,研究以「瞬态空化实现滤网式生物反应器中滤饼层的超快速去除,从而高效完成污水处理过程中的泥-液分离」为题于《自然 – 水》期刊发表。
